资讯
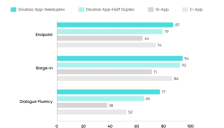
字节跳动发布原生全双工语音大模型Seeduplex:懂倾听、抗干扰
本文介绍字节跳动4月9日发布的原生全双工语音大模型Seeduplex,其突破“边听边说”同步处理框架,抗干扰能力提升,误回复率、误打断率降50%,判停延迟缩短,已在豆包App全量上线,推动AI语音交互向实时自然交互演进,为多模态交互行业发展提供新方向。

Meta发布Muse Spark个人超级智能模型:算力节省10倍 经千人医生训练 支持拍照识别数独、可提供专业级健康咨询服务
Meta正式发布Muse系列首款个人超级智能模型Muse Spark。该模型采用原生多模态架构,算力效率较Llama4Maverick提升10倍。Muse Spark凭借多智能体并行推理与深度视觉能力,可实现拍照出数独等复杂交互,更通过千人医生联合训练提供专业健康建议。目前模型已在Meta.ai及应用端上线,标志着个人AI智能进入低能耗、高专业度的新阶段。
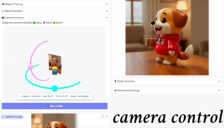
从平面修图到空间重塑:京东开源图像模型JoyAI-Image-Edit重新定义AI编辑
京东探索研究院正式开源JoyAI-Image-Edit图像模型,引领AI修图迈向“空间智能”新阶段。该模型通过深度建模三维空间,实现了对相机视角、物体位移及缩放的精准控制,并全面兼容15类通用编辑需求。其出色的几何一致性与物理规律理解力,为电商生产、创意设计及具身智能等领域提供了强大的底层技术支撑。

耶鲁大学研发全开源张拉整体机器人 撞不烂摔不碎还能自主走位
本文介绍耶鲁大学与罗格斯大学联合研发的全开源张拉整体机器人,其采用刚性杆+弹性绳索的软结构,具备高抗冲击性,适配斜坡、沙地、草地等复杂地形,通过离线建模+在线重规划的闭环控制实现自主导航,硬件方案完全开源可复现,为具身智能载体的抗损与复杂场景应用提供了新的技术思路。
微软 GitHub 推出跨模型 AI 审查功能 Rubber Duck 助力提升编程效率
微软 GitHub 为其 Copilot CLI 推出了实验性功能 Rubber Duck,引入了创新的跨模型 AI 审查机制。该功能旨在通过结合如 Claude Sonnet 4.6 和 GPT-5.4 等不同 AI 模型,提供“第二意见”审查,有效发现代码中的潜在错误,显著提升编程效率和代码准确性。研究显示,Rubber Duck 能弥补近 75% 的性能差距,尤其在处理复杂任务时表现突出,能识别架构逻辑漏洞和跨文件冲突。它支持主动、被动和用户触发的多种审查模式,让开发者能及时获得多角度反馈,从而提升
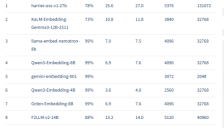
微软必应团队开源27B嵌入模型Harrier,多语言基准测试登顶
微软必应团队近日正式开源了旗舰级27B嵌入模型Harrier及其小参数版本。该模型在多语言MTEB v2基准测试中表现卓越,超越OpenAI、亚马逊及Google Gemini等领先专有模型,登顶榜首。Harrier支持超过100种语言,拥有32,000个词元的超长上下文窗口,并结合真实数据与GPT-5合成数据进行训练,具备强大的复杂语境和长文本处理能力。此次开源不仅为开发者提供了高性能的RAG系统和AI代理工具,更标志着开源AI在语义表示能力上取得重大突破,将加速多语言AI代理的全球落地。
Anthropic 发布最强模型 Mythos:专治陈年漏洞
当地时间周二,Anthropic正式推出了其新一代“前沿模型” Mythos 的预览版本。这款被内部誉为“迄今最强大”的 AI,不仅在推理能力上实现了跨越,更在网络安全领域展现出了令人战栗的杀伤力。核心亮点:AI 界的“超级探针”不同于以往的通用对话模型,Mythos 在“智能体”级别的编程与推理上表现惊人:漏洞挖掘专家: 在过去几周的封闭测试中,Mythos 已成功扫描出数千个零日漏洞,其中包含...
封杀 OpenClaw 只是“止损”?小米罗福莉:大模型盲目卷价格是陷阱
Anthropic因成本倒挂而封杀OpenClaw等第三方框架,暴露出大模型订阅模式下惊人的算力消耗。小米MiMo大模型负责人罗福莉对此评论称,第三方框架效率低下导致Token消耗剧增,Anthropic此举是必然的商业止损。她警告业界,盲目进行“Token价格战”是陷阱,大模型行业真正的出路在于高效框架与优质模型的协同进化。小米MiMo已采用按量计费模式支持第三方接入,旨在促进技术优化,推动AI生态健康发展。文章强调,面对日益紧张的算力资源,大模型行业正从“流量至上”回归“效率优先”的商业本质。

GEN-1和千寻的共识:历史不会重复,但具身智能正在押韵Transformer
本文将具身智能的当前发展与2018年Transformer引发的大模型革命相类比,揭示了行业突破性进展。美国Generalist AI的GEN-1模型通过海量人类行为数据预训练,显著提升物理操作任务成功率并降低机器人数据依赖,被视为具身智能的“ChatGPT时刻”。文章强调,国内千寻智能与GEN-1在数据驱动、高效数据利用及可穿戴设备采集人类数据等技术路线上高度同频,预示着全球具身智能发展路径的收敛。这种颠覆传统“机器教学”的范式变革,有望解决行业“数据贵、落地难”的痛点,推动具身智能实现大规模落地,迈向

机械手新突破!一个电机驱动6个关节,既能温柔捏泡沫,又能拎起3斤重物
本文介绍了一项来自美国西北大学的机械手新突破,成功解决了传统机器人力气与柔顺性难以兼顾的矛盾。研究团队利用创新的绞盘式放大电粘附离合器,实现了单个电机驱动多个关节,使机械手能在瞬时切换中,既能温柔捏取易碎泡沫,又能稳定拎起3斤重物。这项技术通过分离“拉动”与“锁定”功能,大幅扩展了力输出范围,并显著降低了锁定状态下的能耗,为开发更紧凑、多功能且安全的人机协作机器人提供了全新范式。

日本科研重大突破 鼠脑神经元可实时执行AI任务
日本科学家成功训练大鼠皮层神经元,实现了无需外部输入的实时AI计算任务。该研究团队通过构建“闭环储备池计算”系统,利用微流控技术约束神经元连接,使其能够自主学习并生成复杂的周期性及混沌时序信号。这项突破性进展不仅展示了活体神经元作为新型计算资源的巨大潜力,也为未来脑机接口和神经假体设备的应用开辟了新的研究方向,尽管仍需解决性能延迟等技术挑战。

机器人喂饭总掉?科学家造了把会“拥抱”食物的勺子
本文介绍了弗吉尼亚理工大学和康奈尔大学团队在顶刊IJRR上发表的创新成果——Kiri-Spoon,一款专为辅助进食机器人设计的智能餐具。针对现有机器人喂饭易掉落、操作复杂的痛点,Kiri-Spoon借鉴“切纸”艺术,采用可变形结构,能像“拥抱”食物一样将其稳稳包裹,大幅提升了抓取成功率,尤其对柔软湿滑食物表现卓越。这项突破性研究不仅简化了机器人控制算法,还通过与用户和看护者合作,确保了舒适的用户体验,旨在帮助行动不便者重获独立进食的尊严。


谷歌Gemma 4全面开源 小模型展现超强AI能力
谷歌近日重磅开源Gemma4系列模型,标志着人工智能领域的重要突破。该系列模型以其小参数量却展现出超强AI能力而引人注目,其中一款仅3.8亿参数便能超越体量20倍的大模型,让强大AI轻松部署至手机和轻薄本。Gemma4通过底层架构创新,提升计算效率,并特别优化移动设备和物联网终端应用。它在多项行业标准测试中表现卓越,涵盖文本生成、数学推导和代码编写。Gemma4采用Apache2.0许可证,支持灵活部署,为开发者构建智能应用提供了开放高效的环境。
斯坦福用三部iPhone让机器人学会洗衣递送铺桌布
本文介绍斯坦福与丰田研究所联合研发的HoMMI框架,仅通过三部iPhone采集人类演示数据,就能解决人机身体结构差异问题,让机器人学会洗衣、递送、铺桌布等复杂全身移动操控任务,为机器人技能规模化学习提供了全新可行的技术思路。

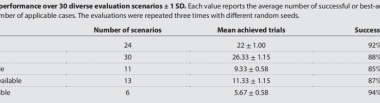
李飞飞发布CaP-X框架 真实机械臂零样本完成复杂任务
本文介绍李飞飞团队联合多机构推出的CaP-X机器人控制框架,无需训练和专属任务数据集,仅靠大模型生成可执行代码即可驱动机械臂完成复杂操作,性能接近甚至超越现有VLA模型,同时配套CaP-Bench评测基准与CaP-Agent0免训练框架,为通用实体机器人落地提供轻量化稳健路径。