资讯
2026 WAIC:征和机器人推出“两只手”,分别面向产业落地与生态合作
在2026 WAIC展会上,征和机器人展示了一整套高可靠灵巧手产品矩阵:CHOHO Hand 2.0(16主动自由度)、TriFlex三指手、DuoPick二指手及CHOHO FlexCell柔性工站。通过全球首创MicroChain微型链传动技术,实现高负载、长寿命、抗冲击的“真干活”产品。解决行业参数堆砌向产线稳定落地的核心问题,让算法团队专注模型迭代,降低工厂部署与运维成本。
2026 WAIC:征和机器人推出“两只手”,分别面向产业落地与生态合作
在2026 WAIC展会上,征和机器人展示了一整套高可靠灵巧手产品矩阵:CHOHO Hand 2.0(16主动自由度)、TriFlex三指手、DuoPick二指手及CHOHO FlexCell柔性工站。通过全球首创MicroChain微型链传动技术,实现高负载、长寿命、抗冲击的“真干活”产品。解决行业参数堆砌向产线稳定落地的核心问题,让算法团队专注模型迭代,降低工厂部署与运维成本。

RynnWorld-4D重塑4D具身世界模型,助力机器人“看到三维未来”
本文围绕阿里达摩院提出的 RynnWorld-4D,解析其如何突破传统2D视频世界模型在深度、运动场和几何一致性上的局限。文章重点介绍RGB-DF表征、三分支Transformer与跨模态对齐机制,展示4D具身世界模型如何为机器人操控提供更可靠的三维预测能力。
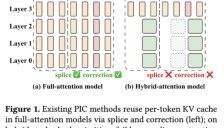
小红书联手北京大学、上海交通大学提出HYPIC,给混合注意力大模型装上位置无关缓存,首token延迟砍掉3.25倍
小红书大模型推理团队联合北大、上交提出HYPIC,实现混合注意力大模型的位置无关缓存。系统解决现有PIC与线性注意力无法兼容问题,通过转移算子缓存、缝合窗口重算和段并行加速冷请求。实测首token延迟平均降低3.25倍,QPS提升1.66倍,任务质量仅差1.71分。完美适配RAG、多文档Agent等超长上下文负载。

面壁智能开源企业数字员工平台 StaffDeck,探索“数字永生”应用可能
文章介绍面壁智能开源企业数字员工平台StaffDeck,聚焦将企业知识、SOP与决策规则沉淀为可持续运行的数字劳动力,区别于传统聊天机器人模式。平台由多家产学研机构联合打造,为企业AI落地、知识留存与流程自动化提供开放底座。

Kimi发布全球最大规模开源模型,国产大模型景气度有望持续走高
文章围绕Kimi发布参数达2.8万亿的全球最大开源模型K3展开,介绍其在视觉理解、长上下文和复杂任务处理上的能力提升,并结合券商观点分析国产大模型调用量增长、商业化提速及国产替代趋势,梳理三六零、昆仑万维等相关受益公司。

Google Vids引入Gemini Omni模型,上传自拍和音频即可定制专属数字分身
文章介绍了Google Vids引入Gemini Omni后的多项升级:用户可通过自拍和音频生成专属数字分身,并结合文字、图片完成对话式视频创作与渐进式编辑。文章还分析了其在企业办公视频场景中的应用潜力,以及谷歌在安全合规和水印防伪方面的布局。

前OpenAI CTO穆拉蒂推出多模态Inkling模型,称其为美国最强开源AI
前OpenAI CTO穆拉蒂创立的思维机器实验室发布从零训练的多模态Inkling开源AI模型,总参数975B(激活41B),上下文达百万tokens,预训练覆盖45万亿token,覆盖文本图像音频视频四模态。团队实力强劲,推理与编程仍落后中国开源模型,但多模态能力突出,在MMMU Pro和MMAU测试中与Gemini 3.1 Pro差距不大。
穆拉蒂回归创业,思维机器实验室发布首款多模态开源模型 Inkling
前OpenAI CTO米拉·穆拉蒂创立的思维机器实验室发布首款多模态开源模型Inkling。模型采用MoE架构,总参数975B、激活41B,支持1M token上下文,预训练数据达45万亿tokens,涵盖文本、图像、音频与视频等多模态。通过Hugging Face和Thinker API全面开源,在数学、音频理解及通用指令跟踪等基准中取得领先优势,是当前美国开源AI领域最具竞争力模型之一。
Kimi K3模型预热视频流出,多段对比直指Claude,向Fable5发起挑战
月之暗面发布预热视频为Kimi K3 造势,匿名模型“Kivine”现身Arena.ai及多段对比测试流出,显示其正面挑战Claude Fable5与GPT-5.6 Sol。文章还梳理了K2至K2.6的迭代路径,凸显Kimi系列在编程与Agent能力上的持续升级。
小米机器人业务提速:持续推进开源并公布阶段性成绩
7月15日,小米机器人团队全量开源380亿参数多模态自回归具身生成基础模型U0(基于EMU3.5),将具身场景生成、迁移等四大任务统一为自回归序列建模。U0在World Arena基准全球第一,虚拟数据生成效率提升83倍。雷军分享汽车工厂“实习”四个月成绩:自攻螺母成功率升至98%,率先实现柔性工件长时连续作业。虚拟引擎与真实闭环形成“场景-数据-迭代”加速飞轮,小米机器人进入具身智能新加速期。

腾讯发布两大具身智能基座模型,VLM与RxBrain提升机器人对现实世界的理解能力
腾讯 Robotics X 与福田实验室联合混元推出两大具身智能基座模型:Hy-Embodied-VLM-1.0 和 Hy-Embodied-RxBrain-1.0。Hy-Embodied-VLM 实现物理状态理解、动作规划与时序自适应推理;Hy-Embodied-RxBrain 统一多模态建模,支持推理规划与目标状态想象。模型开源,提供端侧高效部署支持,助力机器人更懂现实世界。

腾讯发布两大具身智能基座模型,VLM与RxBrain提升机器人对现实世界的理解能力
腾讯 Robotics X 与福田实验室联合混元推出两大具身智能基座模型:Hy-Embodied-VLM-1.0 和 Hy-Embodied-RxBrain-1.0。Hy-Embodied-VLM 实现物理状态理解、动作规划与时序自适应推理;Hy-Embodied-RxBrain 统一多模态建模,支持推理规划与目标状态想象。模型开源,提供端侧高效部署支持,助力机器人更懂现实世界。
全球首款手机级27B多模态AI模型 Bonsai 27B 发布
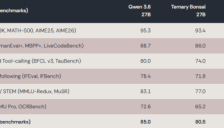
Bonsai27B 作为全球首款可在手机端运行的 27B 级多模态 AI 模型,凭借三元与 1-bit 两种轻量化版本,在性能、推理、视觉和工具调用能力之间取得突破性平衡,为本地智能助手、离线工作流和隐私安全应用打开了新空间。

西湖大学联合阿里达摩院推出干细胞AI模型归元,可实现重编程大规模模拟预测
西湖大学联合阿里达摩院推出干细胞AI模型“归元”,通过构建大规模组合扰动数据集和双模态编码策略,对近400万种重编程组合进行模拟预测,并成功指导实验获得高质量细胞,为胚胎发育研究和细胞治疗提供新工具。