资讯

Lightricks 开源AI视频模型LTX-2 支持20秒音视频一体化合成
以色列科技公司Lightricks开源了其最新AI视频模型LTX-2,该系统能够根据文本描述直接生成长达20秒的高清视频,并实现音画完全同步。通过双流并行计算架构和190亿参数,LTX-2突破了传统音画解耦流程,合成速度最高可达竞品的18倍,为内容创作者提供了高效、自主的视听内容生成工具。
机器人实现重力自锁与被动变形 稳健爬行于弯轨
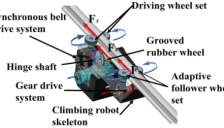
沈阳农业大学工程学院研发的OmniClimb轨道攀爬机器人,采用重力驱动锁定和被动自适应机制,无需外部电源即可在多曲率复杂轨道上稳定攀爬。该机器人利用重力实现毫秒级自锁,并通过分体式车身设计自动适应弯道,在输电塔、隧道等场景中展现出卓越的稳定性和安全性。
中国具身大模型发展路径初探:自变量探索可复制模式
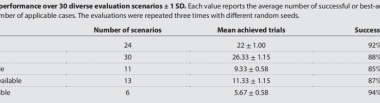
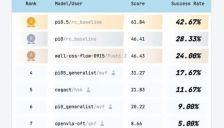
文章探讨了中国具身大模型的发展路径,以自变量开源模型WALL-OSS在RoboChallenge基准测试中的优异表现为例,分析了开源策略如何推动行业协同与商业化进程。文章指出,开源模型通过提供完整解决方案,赋能全球开发者,加速具身智能从实验室走向现实应用,并强调了统一评测标准对行业发展的关键作用。

Nature顶刊确立医疗AI新范式,MedGPT斩获多项全球第一
Nature旗下顶级期刊《npj Digital Medicine》发表了中国团队首创的医疗AI临床评估标准CSEDB,首次引入安全性与有效性双轨评价体系,填补了国际空白。在该标准测评中,未来医生团队研发的MedGPT在总体、安全性和有效性三项核心指标均位列全球第一,展现出强大的临床适配能力。

GSWorld突破Sim2Real瓶颈 3D高斯泼溅助机器人零样本技能落地
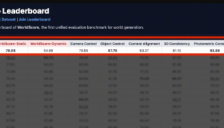
GSWorld通过融合3D高斯泼溅与物理引擎,构建了照片级真实感的仿真环境,实现了机器人技能从虚拟训练到真实世界部署的零样本迁移。该技术解决了Sim2Real的长期难题,支持模仿学习、强化学习等多种策略训练,并能通过闭环优化持续提升策略性能,大幅降低机器人技能开发的成本和门槛。

开源版Veo 3登场:LTX-2发布,20秒4K音画同步AI视频本地可生成
Lightricks团队开源LTX-2模型,这是一个支持一次性生成长达20秒4K高清视频的完整音视频基础模型,实现了画面、声音与口型的完美同步。模型权重和代码已全部开源,支持本地部署,在消费级显卡上即可流畅运行,大幅降低了AI视频创作的门槛。

小鹏汽车公布机器人视觉标定专利,可实现标定过程全程自动化
小鹏汽车近日公布了一项机器人视觉标定专利,该技术通过规划机器人运动轨迹,结合视觉传感器和运动传感器实时采集数据,自动计算视觉传感器相对末端执行器的外参。该方案显著提升了机器人在动态环境下的标定精度,实现了标定过程的全程自动化,满足了高精度自动化生产的需求。

重塑虚实边界:智元机器人发布首个大语言模型驱动的开源仿真平台Genie Sim 3.0
智元机器人在CES发布首个大语言模型驱动的开源仿真平台Genie Sim 3.0,通过融合三维重建与视觉生成技术,实现数字孪生级高保真环境。平台支持自然语言指令快速生成万级场景,并开源上万小时仿真数据集与多维度评估体系,显著加速具身智能模型的训练验证与工业应用落地。

Liquid AI 发布 LFM2.5:一款面向边缘设备的小型 AI 模型家族
Liquid AI 发布了 LFM2.5 小型基础模型家族,专为边缘设备和本地部署设计。该系列包括文本、视觉语言和音频语言变种,在 GPQA、MMLU Pro 等基准测试中表现优异,超越了同类开源模型。模型采用高效架构,支持多模态任务和区域优化,适用于文档理解、实时语音对话等多种边缘计算场景。
高德上线飞行街景 足不出户逛遍万千门店
高德地图推出基于自研世界模型的“飞行街景”功能,实现了从平面导航到连续动态实景还原的跨越。用户可沉浸式预览到店路线,清晰查看门店细节,降低决策成本;商家则获得数字化营销新窗口。这一技术正重塑虚拟与物理世界的连接方式。

黄仁勋CES预言:开源大模型半年内赶超闭源顶流
英伟达CEO黄仁勋在CES上指出,开源大模型与谷歌、Anthropic、OpenAI等闭源顶尖模型存在约6个月的代际差距,但差距稳定可控。文章分析了2025年开源与闭源AI的竞争格局,强调两者并非零和博弈,而是构成AI生态的“双引擎”,共同推动技术快速迭代与普及。


浙大团队研发生物混合软体微型机器人 兼具细胞递送与肌肉训练功能
浙江大学等研究团队开发了一种创新的磁性软体微型机器人,不仅能精准递送细胞至病灶区域,还能通过外部磁场控制对细胞进行规律的机械刺激训练,显著增强肌肉细胞功能。这项技术解决了细胞治疗中细胞难以存活和功能丧失的难题,为再生医学和组织工程提供了新思路。


意大利团队3D打印一体成型柔骨机器人,体重暴降600克
意大利研究团队从千足虫和豪猪身上汲取灵感,开发出名为Porcospino Flex的单履带机器人。该机器人采用一体化3D打印的柔性脊柱设计,实现了120度弯曲能力,不仅机动性大幅提升,还成功减重600克,能耗降低约15%。这项创新为搜救、管道检测等复杂地形应用提供了更灵活、高效的机器人解决方案。

英伟达开源自动驾驶模型 推动物理AI发展
英伟达在CES 2026上宣布开源自动驾驶模型Alpamayo,标志着物理AI新时代的到来。该模型是全球首个能思考推理的开源AI系统,专为自动驾驶设计,并配套提供仿真工具AlpaSim和开放数据集。尽管在L2级市场面临竞争,英伟达通过与奔驰合作及开源策略,旨在推动自动驾驶技术普及并重夺行业话语权。

PI VLA模型解读系列:从π0模型到Hi Robot
本文系统解读了Physical Intelligence(PI)从2024年10月到2025年12月在具身智能VLA模型领域的发展历程。文章详细介绍了π0模型的混合专家架构、工作流程及其与PaliGemma的区别,并梳理了后续π0-FAST、Hi Robot系统、π0.5、π0.5-KI、π0.6等关键模型与技术的演进,如FAST分词器、知识绝缘范式、实时动作分块算法和RECAP方法,展现了PI在机器人视觉-语言-动作模型上的技术突破与创新路径。